






项目案例
CASES
桂林信息科技学院YXEIP-DWG-D1开放式双馈型风力发电模拟测试平台
南京9001jcc金沙以诚为本科技有限公司设计了一整套模拟定桨距式的永磁双馈风力发电的实验仿真平台。通过此平台,研究人员可以研究永磁双馈风力发电机的真实工作特性,可以缩短研究和开发周期、节省研究经费,便于对风力发电系统的控制技术展开全面深入的研究,具有重要的显示意义。
所属分类:
项目案例
开放式风光储荷能源系统
联系我们
方案详情
在"双碳"目标驱动下,桂林信息科技学院引入南京9001jcc金沙以诚为本开放式双馈风力发电模拟测试平台,为新能源研究按下"加速键"!永磁双馈风力发电机因其高效率、高可靠性和结构紧凑等优势,成为风电领域的研究热点。它采用永磁结构,省去了电刷和集电环等易损部件,同时通过直接与风轮连接,解决了传统齿轮传动效率低、故障率高的问题。然而,风电技术的实验室研究面临诸多挑战:现场试验受风速、天气等自然条件限制,实验周期长、成本高且风险大。为此,南京9001jcc金沙以诚为本科技有限公司开发了定桨距式永磁双馈风力发电实验仿真平台。该平台可模拟真实风场环境,帮助研究人员高效开展控制技术研究,缩短研发周期,降低成本和风险,对推动风电技术进步具有重要意义。
01
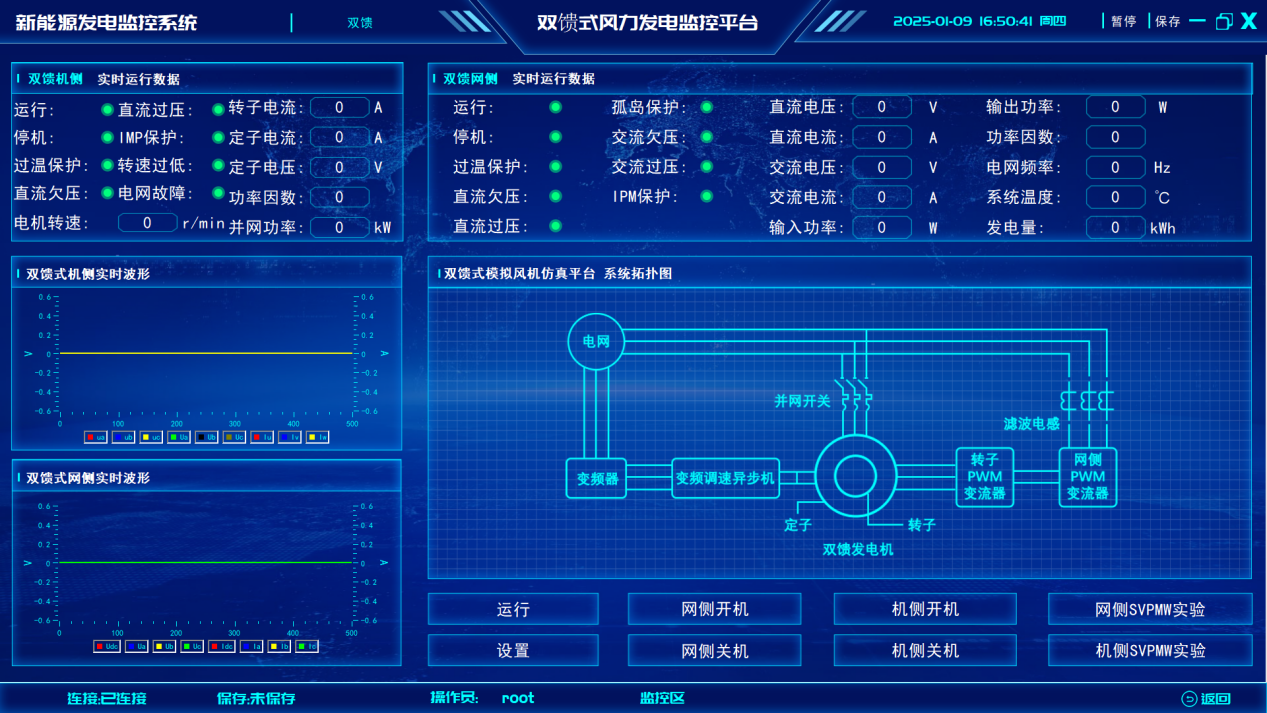
开放式双馈型风力发电模拟测试平台组成
成:
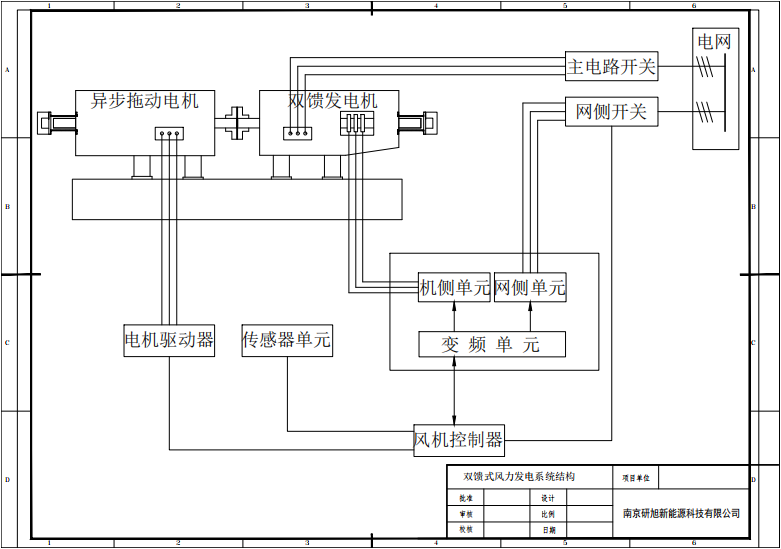
设备组成
1)矢量变频器和三相异步调速电机来模拟实际的风力机;
2)三相异步调速电机通过联轴器带动双馈发电机发电;
3)发电机转子连接交流励磁变频器,通过励磁变频器对转子的控制,实现定子的并网;
4)双向变流器与励磁变频器通过直流母线连接,实现能量双向流动的目的,即可为转子提供励磁电流,也可以吸收转子产生的转差功率;
5)监控前台,主要由工控机、显示器、上位机应用软件组成,实现对变频器、整流器、逆变器等设备的数据监控以及记录保存;
6)风速调速器设备,主要目的就是实现定桨距角变速恒频的最大发电功率追踪;
双馈风力发电实验仿真平台工作原理
2.1 变频器
变频器带动三相异步电机,可以有两种模式,一种为标量控制,即V/F模式,此种模式无法实现发电功率最大追踪,只是当发电机转速越快,发电功率越大;另外一种为矢量控制,即转矩控制,此种模式变频器按照特定转矩送给电机,当电机运行至最佳速度时,发电功率可以达到最大值。当桨距角和叶片半径一定时,风能利用系数只与叶尖速比相关,根据上位机设定的风速值,可以获得最佳转速值和对应的转矩值。将转速值发给可控整流器,转矩值发给变频器,这样就实现了功率最大追踪,即MPPT功能。矢量控制需要另外配备专门的调速器,本系统默认采用的是VF控制模式。
2.2 对托机组
机组由三相异步调速电机、联轴器、双馈发电机组成。其中三相异步电机采用3对级,额定转速1000r/min。双馈发电机采用3对级,额定转速1000r/min。
2.3 励磁变流器
励磁变流器由机侧PWM励磁变频器和网侧PWM双向变流器组成。
机侧PWM励磁变频器主要目的就是为转子绕组提供励磁电流,其内部采用DSP控制器,运行电网电压定向矢量控制模型。其控制算法框图如下图2-1所示:

图2-1 电网电压定向矢量控制
PWM励磁变频器在系统中控制非常关键。
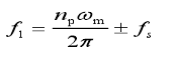
双馈电机的变速运行是通过PWM励磁变频器在电机转子绕组中施加三相低频交流电实现的。调节励磁电流频率,可以确保定子侧输出频率保持恒定;采用矢量控制技术,调节励磁电流的幅值和相位,可以确保定子侧有功功率以及无功功率的控制互步干扰;当风速变化引起发电机的转速n变化时,应控制转子电流的频率fs使得定子输出频率f1保持恒定,器关系如下所示:
当发电机的转速n2低于定子磁场的同步旋转速度n1时,发电机处于次同步速度运行(如图3-2所示),此时变频器应向发电机转子提供正序励磁电流。从功率角度来说,电机轴上功率PM和转子输入功率Pr都以电磁功率的形式传递到定子侧,再回馈给电网PS。当发电机转速n2高于定子磁场的同步旋转速度n1时,发电机处于超同步速度运行(如下图3-3所示),此时变频器应向发电机转子提供负序励磁电流,保证定子磁场旋转速度与转子速度一致。从功率角度来说,就是电机轴上功率PM,一部分转化为转差功率Pr通过转子侧变频器回馈到电网,另一部分转化为电磁功率,由定子回馈到电网上,定子输出功率为PS
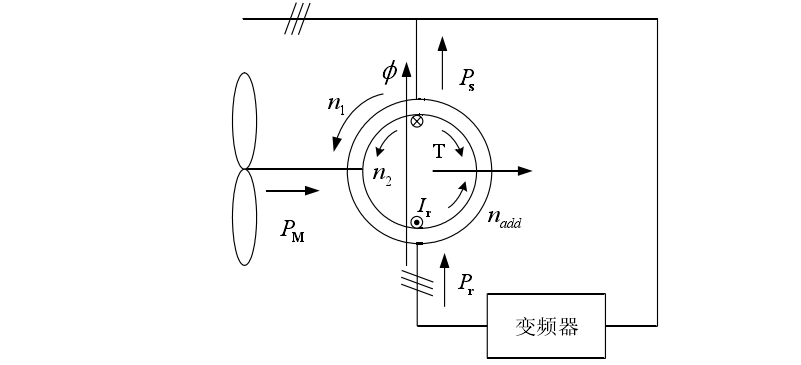
图2-2 发电机处于次同步运行
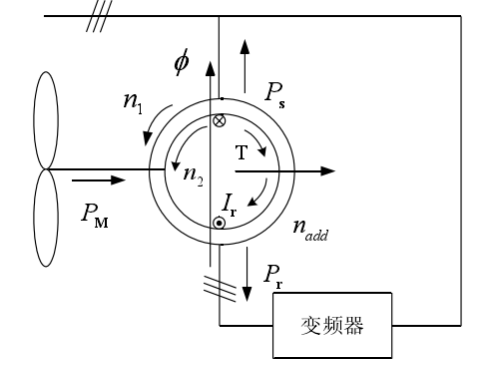
图3-3 发电机处于超同步运行
网侧PWM双向变流器实际就是一个双向电源,既可以将转子PWM变频器的直流能量逆变为符合并网要求的交流电能,也可以将电网的交流能量整流成直流能量提供给转子PWM变频器。电压空间矢量控制是目前的主流算法。
2.4 调速系统
调速系统配合上位机、整流器、变频器实现定桨距变速恒频发电机功率最大追踪。
VF控制:就是保证输出电压跟频率成正比的控制,这样可以使电动机的磁通保持一定,避免弱磁和磁饱和现场的产生,多用于风机、泵类节能型变频器。它是一种简单控制,通用性强,经济性好,用于速度精度要求不十分严格或负载变动较小的场合。
矢量控制国外也叫磁场定向控制,其实质是在三相交流电的电压大小和频率大小控制的基础上,还加上了相位控制,这个相位在具体操作中体现为一个角度,简单的讲就是电机定子电流相对于转子的位置角。我们知道,电机定子三相对称交流电的综合效果是一个旋转磁铁,通电后这个旋转的磁场通过感应再转子上生产三相交流电流,这个电流也就等效成一个磁铁,这样就相当于定子磁铁拖着转子磁铁转了,这个是电机旋转的基本原理。那么如何产生最大的力矩呢?只有定子磁铁和转子磁铁的相对位置靠的最近时。因此与转子的位置是有关系的。矢量控制会通过实测回来的电流结合点击参数,实时计算出转子位置,这个过程就是所谓的“磁场定向”,然后实时决定三相定子绕组上电压的相位,这样理论上可以做到同样的电流下产生的转矩最优,从而减小点击负载变化时的顺态过程。
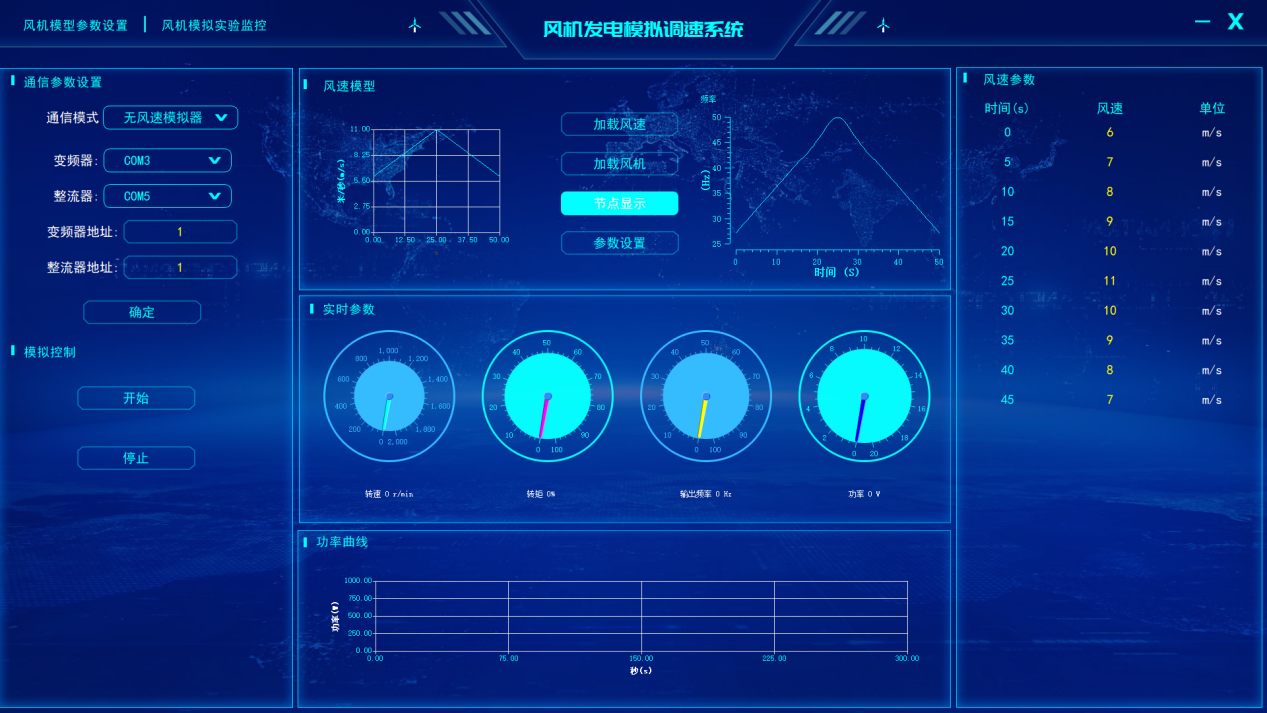
2.5 风机调速系统
9001jcc金沙以诚为本根据多年高校、科研单位的意见回馈,设计此风速模拟器功能。
9001jcc金沙以诚为本设计的风机模型共有3种,分别是最简线性VF模型、定叶尖速比VF控制模型、矢量控制模型。
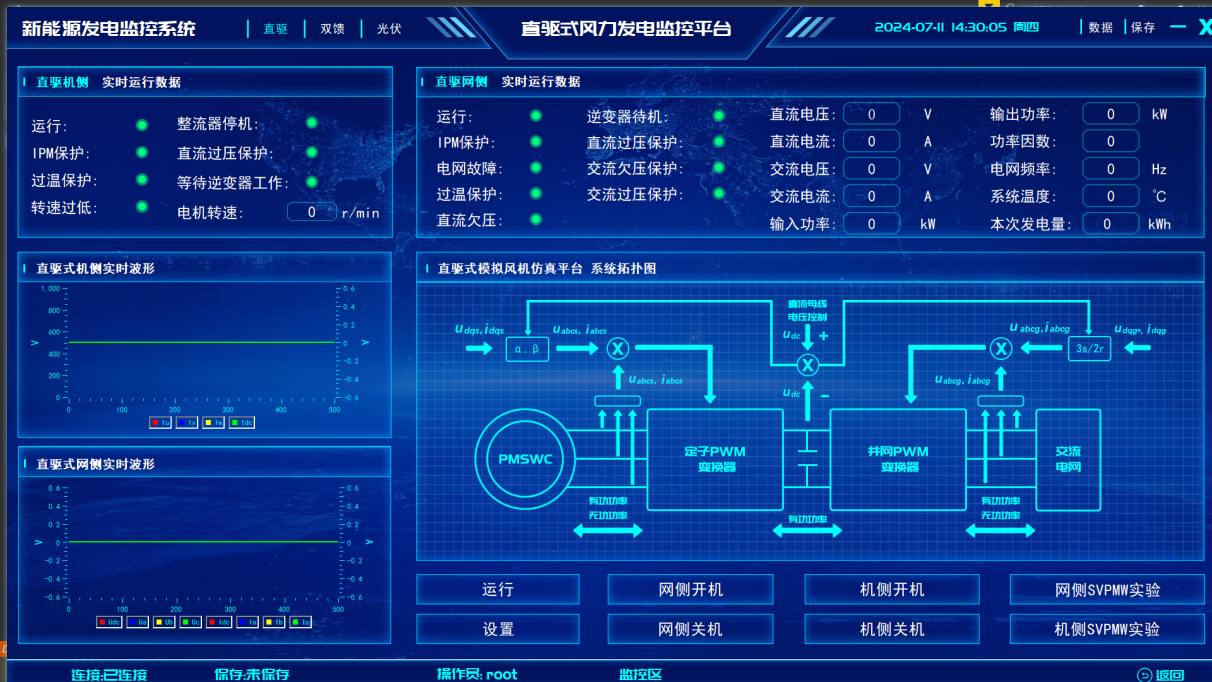
监控系统界面图

风力发电风速模拟界面图
可设定风速曲线表,一共有20组数据,然后可以随便调整风速变化时间。最后可以通过拟合按钮,查看风速与功率的对应曲线关系图,见下图所示:
风速与功率的对应曲线关系图
2.6 发电监控系统
监控上位机应用软件为用户提供了可视的操作界面,主要包括三大功能:风速模拟功能、实时监控功能、历史数据功能。其界面如下:
实时监控功能
监控界面
,
监控界面可以查看各类瞬时参数
1)直流母线电压;
2)直流母线电流;
3)电网电压;
4)网侧双向变流器交流电流;
5)直流功率;
6)网侧双向变流器的交流功率;
7)网侧双向变流器的功率因数;
8)电网频率;
9)机柜内部的温度;
10)电机的转速;
11)转子电流;
12)定子并网电流;
13)定子并网功率;
14)定子并网功率因数;
算法功能
监控软件中还具备算法研究界面,即电网定向矢量算法。通过以下图所示界面用户可以非常清晰的了解算法的结构,同时可以获取每个步骤的计算结果值,以便仿真分析。试验者可以在下面界面输入有功率电流、无功电流的值,查看定子并网的实际情况。

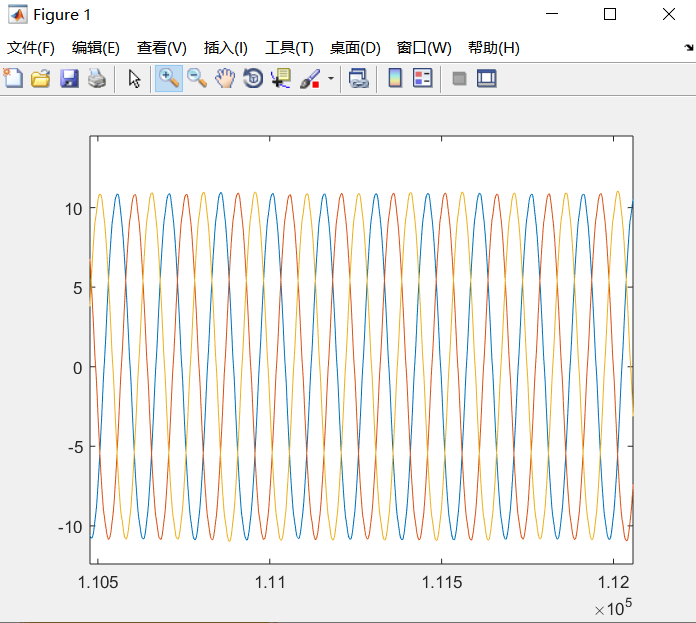
历史数据功能
本软件还可以完成数据的保存,用户只需点击软件右上角的“保存”按钮,即可完成数据的开始保存,当再次点击“保存”按钮时,保存过程结束。保存数据的格式为.mat,此格式文件可以通过MATLAB软件打开,并采用PLOT工具绘图,分析。
02
双馈式风力发电实验仿真平台实验
1)双馈式风力发电系统整体原理认知实验(基础)
2)自然风模拟实验(基础)
3)背靠背变流器操作实验
4)背靠背式变流器模拟量采集实验(验证)
5)发电机起励实验(验证)
6)发电机空载同步并网实验(验证)
7)发电机变速恒频并网实验(验证)
8)发电机矢量式MPPT并网实验(研究)
9)背靠背变流器控制方法研究实验(创新)
10)控制采集板、驱动功率板等板卡硬件原理(开源)
11)DSP的入门、使用和烧写实验(开源)
12)CCS软件使用(开源)
13)软件开发流程讲解(开源)
03
风力发电实验仿真平台开放资料
(1)变频器:操作说明书
(2)整流柜:
1)整体布线CAD图、PDF图;
2)DSP控制核心板:PDF原理图、PDF版本PCB、内部运行源代码工程(内含算法静态库)、配套详细的设计原理说明文档;
3)控制底板:PDF原理图、PDF版本PCB、配套详细的设计原理说明文档;
4)继电器板:PDF原理图、PDF版本PCB、配套详细的设计原理说明文档;
5)IPM隔离电源板:PDF原理图、PDF版本PCB、配套详细的设计原理说明文档;
6)算法设计说明文档;
(3)逆变柜:
1)整体布线CAD图、PDF图;
2)DSP控制核心板:PDF原理图、PDF版本PCB、内部运行源代码工程(内含算法静态库)、配套详细的设计原理说明文档;
3)控制底板:PDF原理图、PDF版本PCB、配套详细的设计原理说明文档;
4)继电器板:PDF原理图、PDF版本PCB、配套详细的设计原理说明文档;
5)IPM隔离电源板:PDF原理图、PDF版本PCB、配套详细的设计原理说明文档;
6)算法设计说明文档;
(4)监控前台:
1)上位机应用软件安装文件;
2)数据库安装文件;
3)上位机DEMO例程;
4)操作说明;
constitution
04
快速原型开发控制器RCP(选配)
快速原型控制器(RCP)

YXSPACE产品系列能够将用户设计的图形化的高级语言编写的控制算法(Simulink)转换成DIDO、AIAO量,完成实际硬件控制。其基本控制框图如下所示:
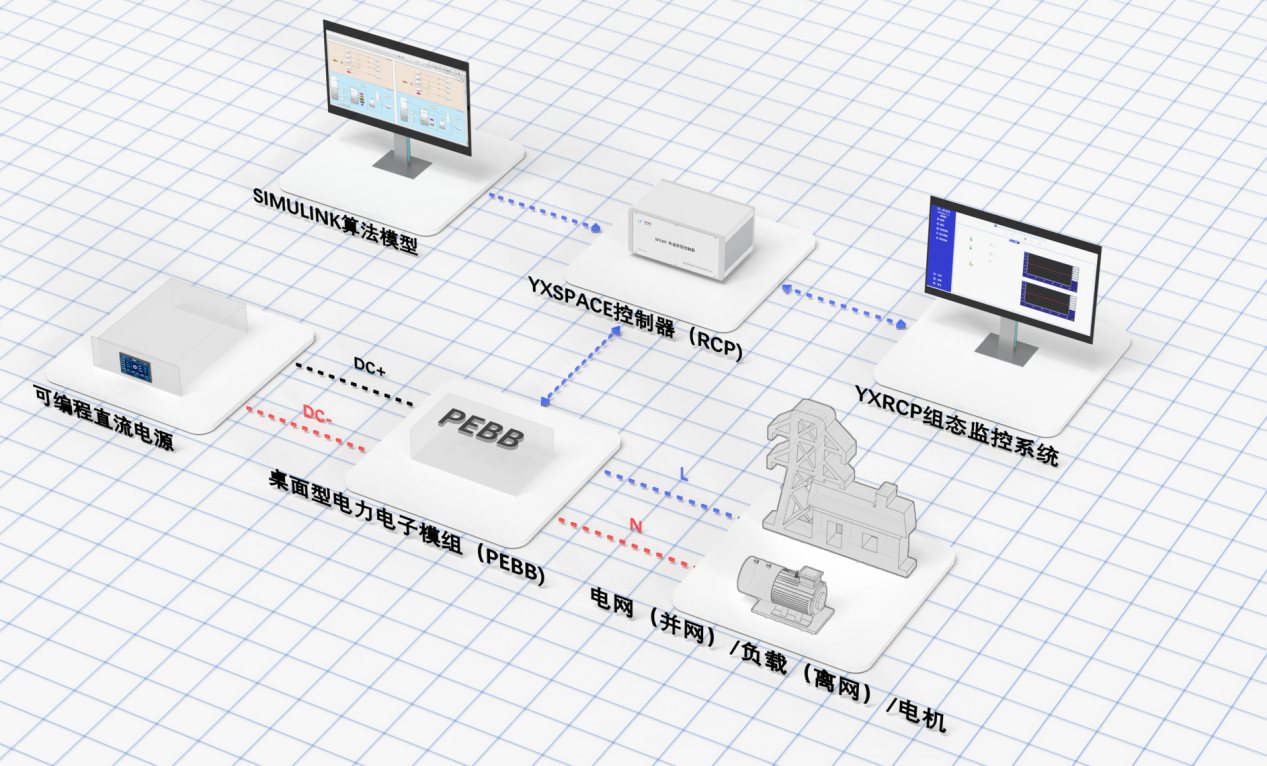
控制算法模型一般采用Matlab中的Simulink工具搭建,将模型中的接口与硬件驱动接口绑定后,再结合TI公司的CCS编译工具产生可执行文件,下载至YXSPACE控制器中运行。
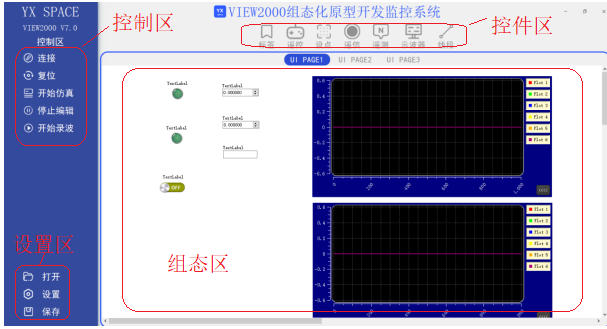
9001jcc金沙以诚为本YXSPACE-VIEW2000软件主要用于配置YXSPACE控制器工作模式,同时可以实时监测控制过程中的各类运行量,包括采集量、中间控制变量等。YXSPACE-VIEW2000包括了6类组态控件,分别为遥控控件、遥信控件、遥调控件、遥测控件、示波器控件以及文字编辑控件等。用户可以借助这些控件,直观、方便的搭建监控界面,监控控制器内部运行的详细信息。
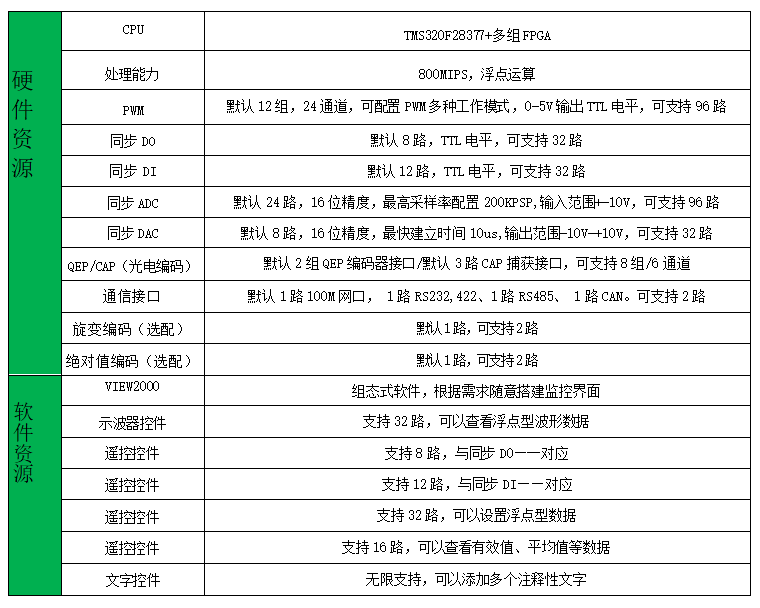
9001jcc金沙以诚为本SP2000采用外扩插卡式结构,简洁轻便,板卡资源如下:
YXSPACE独特优点
采用目前市面成品常用的控制芯片作为CPU,其仿真结果针对实际研究更具有参考性;
在Matlab中设计的控制算法自动生成代码,自动加载到实时目标机中运行,避免了繁琐的编程和Debug工作
使用门槛低,会Matlab仿真即可完成实验测试工作,所有测试工作只需一人即可完成
模型与硬件接口链接简单,只需记住端口编号即可,更不用配置硬件各类细节,免去一切不必要的麻烦;
性价比高,在同等功能的前提下,YXSPACE成本更低。
具备自主编写的驱动库,可以直接导入到Simulink库中,用户可以直接在Matlab软件中拖动相应的硬件元件库,将模型中的数据直接与硬件对接,无需再花费时间去查询硬件映射。8种库文件,可适用于各种工程调试需求。
模型转换文件的透明化,用户可直接查看模型转换后的源码。
constitution
YXSPACE-VIEW2000软件
9001jcc金沙以诚为本公司专门为SP2000研发了一套上位机监控软件VIEW2000软件。

微信公众号





